 098-98-797-98
098-98-797-98 066-98-797-98
066-98-797-98 093-800-92-08
093-800-92-08
Основные типы электродвигателей в легком электротранспорте
Электродвигатели – это электрические машины для преобразования электрической энергии в механическую.
Электродвигатели постоянного тока предназначены для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями (высокая равномерность вращения и высокая перегрузочная способность).
Вентильный электродвигатель (brushless, бесщёточные, PMSM или BLDC), то есть «управляемый силовыми ключами» (вентилями) — это разновидность синхронного электродвигателя постоянного тока, у которого щёточно-коллекторный узел заменён полупроводниковым контроллером, управляемым датчиками положения ротора. Работа вентильного электродвигателя основана на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. По типу питания, такие двигатели делятся на бесконтактные двигатели постоянного и переменного токов.

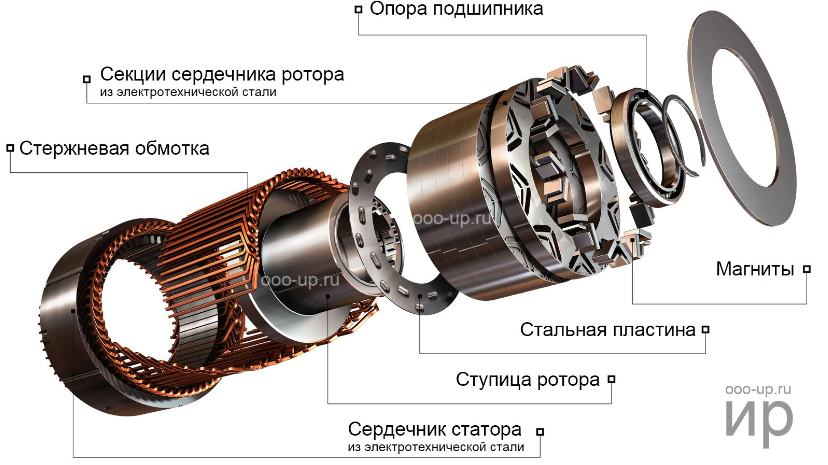
Конструкция прямоприводного мотор колеса для велосипеда
Вентильный двигатель состоит из ротора с постоянными магнитами, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером (процессором).
По конструкции вентильные электродвигатели делятся на две группы: inrunner (инраннер) и outrunner (аутраннер). Внешне инраннеры чаще всего выглядят, как традиционные электродвигатели; аутраннеры – мотор колёса, хотя в редукторных мотор колёсах встречаются оба типа двигателей: аутраннеры и инраннеры.
Inrunner имеет расположенные по внутренней поверхности корпуса обмотки (статор), и вращающийся внутри них ротор с постоянными неодимовыми магнитами. Такая схема обычно используется в высокооборотных электродвигателях, с небольшим количеством полюсов, где механическая энергия передаётся с помощью вала. Конструктивно, инраннер проще аутраннера, потому что его статор – это часть корпуса. Корпус инраннера удобнее устанавливать и крепить к транспортному средству.
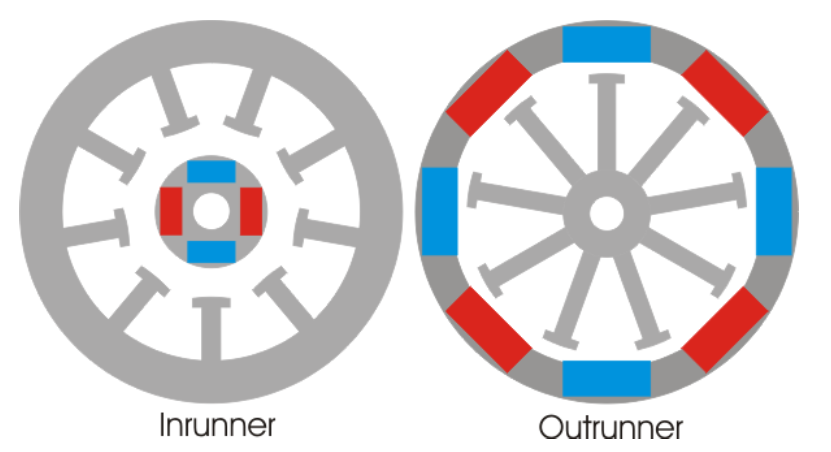
Outrunner имеет неподвижные обмотки в центральной части двигателя (статор), вокруг которых вращается ротор с закреплёнными на его корпусе постоянными неодимовыми магнитами. В аутраннерах вращается внешняя часть мотора (корпус). Практически все прямо-приводные мотор колёса – это аутраннеры. При необходимости их можно делать с высоким крутящим моментом и небольшой скоростью вращения (пример – низкооборотное прямоприводное мотор колесо Вольта байкс для тачек). Аутраннеры крепятся к транспорту за ось или за часть статора. Кабель питания также заводится в аутраннер через ось, или часть статора.
По способу укладки витков в обмотки статора, различают двигатели, имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально. Правильная форма фазного тока для электродвигателя, имеет значение в правильном выборе контроллера, для достижения наибольшей эффективности работы электродвигателя (мотор колеса).
Для питания и управления вентильными электродвигателями применяется инвертор напряжения с широтно-импульсной модуляцией (ШИМ), называемый контроллером или коммутатором. Контроллер поочерёдно подаёт импульсы тока на разные обмотки двигателя таким образом, чтобы взаимодействие их магнитного поля с магнитным полем ротора, создавало крутящий момент. Двигатели оснащены датчиками положения ротора (ДПР), для осуществления обратной связи с контроллером по положению обмоток, скорости и ускорению.
Электродвигатель типа «аутраннер» в редукторном мотор колесе для велосипеда
В лёгком электротранспорте получили наибольшее распространение 3-х фазные вентильные электродвигатели (мотор колёса) с датчиками положения ротора, основанные на эффекте Холла. Они имеют 3 более толстых силовых провода питания (3 фазы) и 5 тонких управляющих проводов (2 провода – питание датчиков Холла; 3 провода – сигнал от датчиков Холла).
Благодаря высокому ресурсу работы, обусловленному отсутствием коллекторно-щёточного узла, а также большому пусковому моменту и высокой перегрузочной способности, вентильные электродвигатели в мотор колёсах - основной тип электропривода на электровелосипедах, электроскутерах, электромотоциклах и других видах персонального электротранспорта.
Основные достоинства вентильных электродвигателей:
- Бесконтактность и отсутствие узлов, требующих обслуживания;
- Высокий ресурс;
- Большой пусковой момент и большая перегрузочная способность по моменту в (5 и более раз);
- Высокое быстродействие по переходным режимам;
- Огромный диапазон регулировок по частоте вращения 1:10000 и более, что минимум на два порядка выше, чем у асинхронных двигателей;
- Самые лучшие показатели по КПД и cosφ, их максимальный КПД может превышать 90%, а средний КПД составляет примерно 80% (у асинхронных двигателей КПД на половинных нагрузках может падать до 40-60%);
- Минимальное потребление тока без нагрузки;
- Минимальные пусковые токи;
- Минимальные размеры и масса на единицу мощности, относительно других типов электродвигателей.
Главное направление совершенствования вентильных электродвигателей - разработка адаптивных бездатчиковых алгоритмов управления. Это позволяет снизить себестоимость и повысить надежность таких электроприводов (у Вольта байкс – это серия так называемых «универсальных контроллеров», которые умеют управлять вентильными электродвигателями (мотор колёсами) с датчиками холла и без них (с неисправными датчиками).
Коллекторный электродвигатель постоянного тока
Коллекторный электродвигатель постоянного тока (brushed, щеточные, ДПТ) —электрическая машина, в которой датчиком положения ротора и переключателем тока в обмотках является щёточно-коллекторный узел. Наличие щеточно-коллекторного узла является определяющей особенностью коллекторных двигателей.
Коллекторный двигатель состоит из подвижной части — ротора с обмотками и неподвижной — статора (корпус) с ферритовыми магнитами. Коллектор - набор контактов, расположенных по кругу на роторе. Щётки - скользящие токосъёмные контакты, расположены вне ротора и прижаты к коллектору. Ротор двигателя разгоняет магнитное поле, создаваемое на обмотках. Величина этого поля зависит от напряжения приложенного к обмоткам. Чем выше напряжение, - тем большее магнитное поле будет создано, и тем быстрее будет вращаться ротор.
Подвижные контакты (щётки) взаимодействуя с коллектором, могут создавать искрение и приводить к ускоренному износу коллекторно-щёточного узла при неблагоприятных условиях эксплуатации (влага, грязь, пыль). Но даже в идеальных условиях, в процессе работы коллекторных двигателей происходит постепенный износ графитовых щеток и металла коллектора, по которым щетки скользят. Выработав свой ресурс, первыми обычно выходят из строя щётки. После нескольких замен щёток, свой ресурс вырабатывает и коллектор.
Самые маленькие двигатели данного типа, с мощностью в несколько Ватт, состоят из корпуса, в который вставлен двухполюсный статор из постоянных магнитов (неподвижная часть двигателя). В нём на подшипниках скольжения (втулки) вращается трёхполюсной ротор (подвижная часть двигателя). Ротор с обмотками вращается внутри статора. Коллекторный узел имеет 2 щётки, контактируемые с 3-мя медными пластинами (коллектором).

Более мощные двигатели (десятки и сотни Ватт), как правило, имеют многополюсный ротор на подшипниках качения; коллекторный узел из коллектора, набранного из медных пластин и четырёх графитовых щёток; четырёхполюсный статор на постоянных ферритовых магнитах. Именно такую конструкцию имеет большинство электродвигателей с номинальной мощностью 250 – 1000 ватт для лёгкого электротранспорта.
Технологии изготовления коллекторных электродвигателей отрабатывались десятилетиями. Коллекторные электродвигатели постоянного тока в производстве обходятся дешевле вентильных электродвигателей. Схема регулятора для коллекторного двигателя - простая, что также уменьшает стоимость электропривода.
Коллекторными электродвигателями легко управлять, но они менее надёжны. Их ресурс уступает всем электродвигателям, не имеющим в конструкции щёточно-коллекторного узла. Уровень магнитной индукции у ферритовых магнитов, - ниже, чем у неодимовых, применяемых в вентильных электродвигателях. Поэтому, размеры коллекторного двигателя - обычно больше, чем у вентильного двигателя аналогичной мощности.
В лёгком электротранспорте коллекторные электродвигатели широко применяются в приводах детских электроквадроциклов, электросамокатов, электроскейтов, дрифткартов, инвалидных колясках с электроприводом.
Главное внешнее отличие коллекторных электродвигателей от других типов - два провода питания (положительный и отрицательный, которыми двигатель подключается к регулятору скорости) , вместо 3-х или 8-и проводов в двигателях других типов.
Асинхронный электродвигатель
Асинхронный электродвигатель в своей конструкции не имеет магнитов, поэтому он более компактный и дешёвый в производстве; у него малый вес. «Асинхронник» работает по принципу взаимодействия вращающегося магнитного поля, возникающего при прохождении трёхфазного переменного тока по обмоткам статора, с магнитным полем, индуктированным током статора в обмотках ротора. В результате возникает сила, заставляющие ротор крутиться в сторону вращения магнитного поля. Название «асинхронный» происходит от разной скорости вращения магнитного поля и ротора. Частота вращения ротора – меньше, чем у магнитного поля, создаваемого обмотками статора. У асинхронного двигателя нет коллекторного узла, поэтому он более надежен по сравнению с коллекторными двигателями.
Статор «асинхронника» – распределенная двухфазная, трехфазная или многофазная обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор представляет собой медный или алюминиевый цилиндр, внутри которого находится железо магнитопровода. К ротору короткозамкнутого типа, напряжение не подводится, но оно индуцируется там за счет переменного поля статора. Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора, различаясь только наличием или отсутствием обмотки ротора.

Промышленный асинхронный двигатель
Асинхронные двигатели с короткозамкнутым ротором применяют в тех электрических приводах, где не требуются большие пусковые моменты. Двигатели с фазным ротором применяются для привода механизмов, которые пускают в ход при большой нагрузке или требующих плавного регулирования скорости.
Асинхронные электродвигатели более распространены в промышленности, где имеется трёхфазная сеть. Асинхронные двигатели применяются и в быту: в тех устройствах, где не нужно регулировать частоту вращения. Чаще всего это так называемые «конденсаторные» двигатели, или, что тоже самое, «однофазные» асинхронники. Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Асинхронный электродвигатель – это двигатель переменного тока. Его минус по сравнению с двигателем постоянного тока - в том, что его сложно регулировать. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Чтобы правильно регулировать частоту вращения асинхронного двигателя, нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление. Но для этого нужен преобразователь частоты. В прошлом веке, регулирование частотой не на чем было делать. Но сегодня, регулируемые асинхронные электроприводы на базе преобразователя частоты – вполне доступны.
Основные достоинства таких двигателей – это низкая цена и малый вес.
Основные недостатки – это малый пусковой момент на валу и большой пусковой ток, в 3-5 раз превышающий номинальный. Еще один большой недостаток асинхронного двигателя – это низкий кпд в режиме частичных нагрузок. Например, при нагрузке в 30% от номинальной, кпд может падать с 90% до 40-60%!
Основной способ борьбы с недостатками асинхронного двигателя – это применение частотного привода. Он преобразует напряжение сети 220/380В в импульсное напряжение переменной частоты и скважности. Тем самым, удается в широких пределах менять частоту оборотов и момент на валу двигателя, избавившись от его недостатков.
Также, в 21 веке, в асинхронных двигателях всё большее распространение получает совмещённая обмотка типа «славянка». Сразу несколько современных изобретателей претендуют на приоритет её создания. На самом деле, она была изобретена более 100 лет назад, а современные инженеры только создали разные вариации на эту тему. Но, так как история двигателестроения не является темой данной статьи, отмечу лишь тот факт, что совмещённая обмотка типа «славянка» повышает крутящий момент и КПД асинхронника, то есть устраняет его основные проблемы.
Синхронный электродвигатель
Синхронный электродвигатель - электрическая машина, у которой частота вращения ротора совпадает с частотой вращения магнитного поля, индуцируемого обмотками статора, поэтому он и называется синхронным.
Синхронные электродвигатели применяются, когда нужен привод, работающий при постоянной скорости. Для получения регулируемого реактивного тока, устанавливают синхронные компенсаторы. Синхронные двигатели конструктивно отличаются от генераторов наличием на роторе дополнительной короткозамкнутой обмотки, необходимой для асинхронного пуска, а также меньшим зазором между статором и ротором.
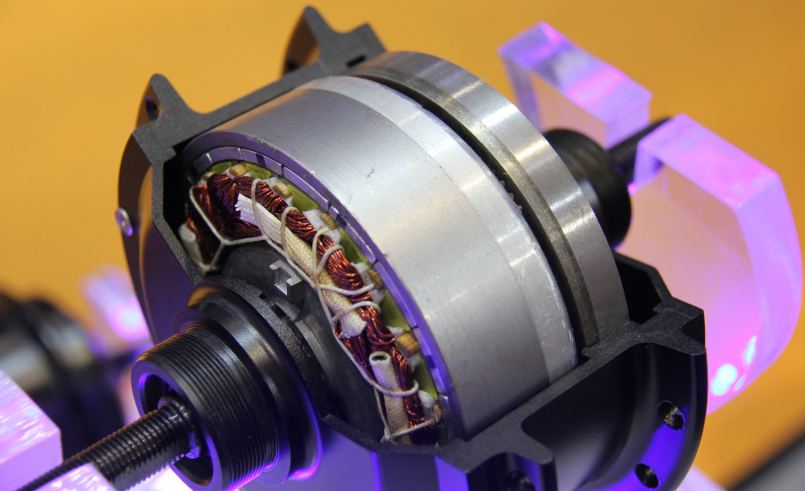
Синхронный двигатель электромобиля в разрезе
У синхронных двигателей КПД выше, а масса на единицу мощности меньше, чем у асинхронных. Ценная особенность синхронного двигателя по сравнению с асинхронным, - возможность регулирования его реактивного тока, за счет изменения тока возбуждения обмотки якоря. Таким образом, можно сделать cosφ близким к единице во всех диапазонах работы и, тем самым, поднять его КПД.
Применительно к транспорту, асинхронные и синхронные электродвигатели получили наибольшее распространение в электромобилях.
Аllyur, Вольта байкс. Фото автора и из интернета.